进入 Ubuntu系统,打开终端,先输入ros2 确保你的ros2 配置成功了。
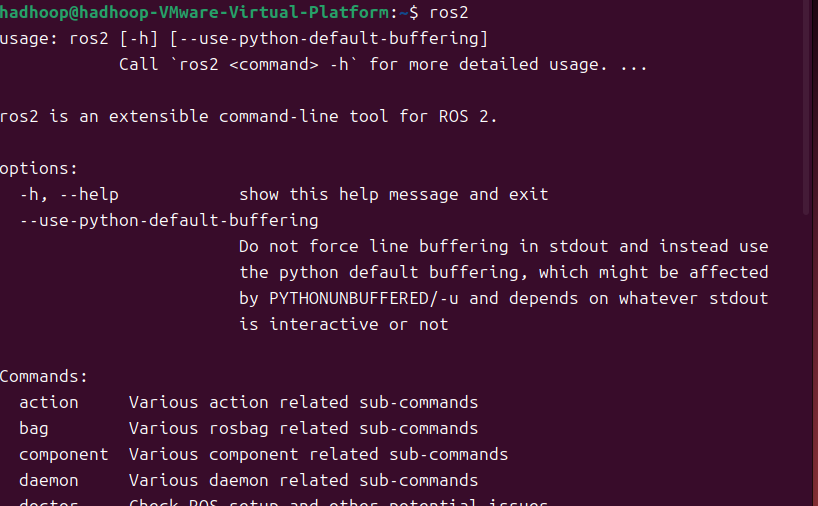
输出 上面的信息 说明ros2 配置的没有问题
然后输入:printenv ROS_DISTRO
printenv ROS_DISTRO
输出的结果是jazzy版本。
转载自CSDN-专业IT技术社区
原文链接:https://blog.csdn.net/Vertira/article/details/158512335

进入 Ubuntu系统,打开终端,先输入ros2 确保你的ros2 配置成功了。
输出 上面的信息 说明ros2 配置的没有问题
然后输入:printenv ROS_DISTRO
printenv ROS_DISTRO
输出的结果是jazzy版本。
转载自CSDN-专业IT技术社区
原文链接:https://blog.csdn.net/Vertira/article/details/158512335